Mechanics
Description
This section is from "The American Cyclopaedia", by George Ripley And Charles A. Dana. Also available from Amazon: The New American Cyclopædia. 16 volumes complete..
Mechanics
Mechanics, that branch of natural philosophy which treats of the action of forces on bodies. It is divided into statics, which treats of the action of forces in equilibrium, and dynamics, which treats of the action of forces on bodies in motion. Newton divided it into practical and rational mechanics, the former relating to the mechanical powers, and the latter to the theory of motion. In a restricted sense the word mechanics signifies the inventing of machines (Gr.![]() to invent or construct), or at most consideration of the action of forces upon them, and this is the sense in which the ancients used it; but the science has long since passed beyond such limits, and comprehends the laws by which the motions of the heavenly bodies are governed, as well as those which affect their form, and also the action of gravitation upon bodies on the earth. Hydrostatics, hydrodynamics, and even sometimes pneumatics, are considered branches of the general science of mechanics. (See Hydromechanics, and Pneumatics.) - The invention of simple machines for moving large masses of bodies is older than history. The lever and inclined plane were probably the first simple powers used, the construction of the latter being naturally suggested by the advantages offered by the natural slopes of hills. It is generally believed that the vast blocks of stone which are found in elevated positions in ancient Egyptian structures were raised to their places by inclined planes formed of earth on the exterior of the walls and afterward removed.
to invent or construct), or at most consideration of the action of forces upon them, and this is the sense in which the ancients used it; but the science has long since passed beyond such limits, and comprehends the laws by which the motions of the heavenly bodies are governed, as well as those which affect their form, and also the action of gravitation upon bodies on the earth. Hydrostatics, hydrodynamics, and even sometimes pneumatics, are considered branches of the general science of mechanics. (See Hydromechanics, and Pneumatics.) - The invention of simple machines for moving large masses of bodies is older than history. The lever and inclined plane were probably the first simple powers used, the construction of the latter being naturally suggested by the advantages offered by the natural slopes of hills. It is generally believed that the vast blocks of stone which are found in elevated positions in ancient Egyptian structures were raised to their places by inclined planes formed of earth on the exterior of the walls and afterward removed.
The successive steps in the invention of machines have not been recorded, the work of Vitruvius on architecture, written under Augustus, being the principal source of information of those which were in use at and before his time. From his descriptions there were then in use the lever, the wheel and axle, the simple and compound pulley, and a forcing pump for supplying the public fountains, whose invention he ascribes to Ctesibius of Alexandria, who flourished in the latter half of the 3d century B. C. Among other machines this mechanician also invented the clepsydra or water cluck. (See Clepsydra.) Vitruvius also describes a complex machine in which wheels acted upon each other by means of cogs, and which was used for measuring distances travelled by carriages or ships; and he describes at considerable length military engines for throwing masses of stone. Water wheels were used for grinding corn, and water was raised by buckets which were moved by wheels, the power being supplied by men walking on them.
It is probable that most of the engines described by him were in use by the Greeks before the erection of the Parthenon. There is no positive evidence of the employment of the expansive force of steam as a moving power before the latter part of the 17th century, and then it was only used to raise water; and its general application to machinery dates only from the year 1768. Among the ancients, Archimedes seems to stand almost or quite alone in the power of conceiving in any great degree true theoretical ideas of mechanics, lie explained the theory of the lever and some important properties of the centre of gravity, and also the fundamental doctrines of hydrostatics, particularly the equilibrium of floating bodies. The idea that the particles of a fluid have the power to communicate force without loss, in consequence of being perfectly free to move among one another, seems never to have been clearly comprehended before his time. Archimedes was so far ahead of his age that it was only within a comparatively recent period (the epoch of Galileo) that his doctrines became established. Before Archimedes the doctrines of Aristotle had been generally adopted in physics, and for many centuries afterward were accepted by the scientific world.
Aristotle taught that all motion was naturally circular, an idea which lasted till the first law of motion was established. He divided motion into natural and violent, and accounted for the fact that a body thrown in a horizontal direction diminishes in velocity, while a falling body increases, by saying that the former is a violent and the latter a natural motion. In accounting for the continuance in motion of a stone thrown by the hand, he asks: "If the hand was the cause of the motion, how could the stone move at all when left to itself? If not, why does it ever stop?" He answers by saying: "There is a motion communicated to the air, the successive parts of which urge the stone onward, and each part of this medium continues to act for some while after it has been acted upon; and the motion ceases when it comes to a particle which cannot act after it has ceased to be acted on." He attempted the discussion of the properties of some of the simple machines, and propounded some theories in regard to the lever, but even these have more the nature of mere suggestions.
He asks why small forces may move great weights by means of a lever, and answers by asking if it is because the greater radius moves the faster; and he also queries whether a wedge affords power because it is composed of two opposite levers. As to the reason why a person when rising from a chair bends his legs and body to acute angles with his thigh, he suggests that it is because the right angle is connected with equality and rest. Here he again departs from the more philosophical method he had pursued with the arms of the lever, and returns to his usual metaphysical ones; and this is the tendency of most of the mechanical ideas of the ancients, with the exception, as has been observed, of those of Archimedes, which were unappreciated by his contemporaries. The latter, in his investigations concerning the properties of the lever, commences with the axiom that two equal weights balance each other on a lever of equal arms, and proceeds by employing the mathematical methods then in use to show that equilibrium always will exist in a lever when the bodies supported by it are inversely proportional to their distances from the fulcrum. Proceeding in his reasoning, he also concludes that there must be in every body a centre of force corresponding to the fulcrum in the lever.
The principles which were so long ago clearly conceived by him were however not only undeveloped, but were not understood, and were therefore neglected for many centuries, till they were revived by Galileo and by Stevinus. - The mechanical advantage of the inclined plane was one of the first and most important propositions which engaged the attention of mechanicians on the revival of physical science. Cardan in 1545 asserted that the force necessary to support a body on an inclined plane is double when the inclination is double. Guido Ubaldo in 1577 attempted to prove that an acute wedge will produce a greater mechanical effect than an obtuse one, but did not establish the proposition. His references to the screw, the inclined plane, and the wedge, however, show that he comprehended their relations. Michael Varro, whose Tractatus de Motu was published at Geneva in 1584, treats of the wedge in a manner which indicates at least an approach to the doctrine of the composition and resolution of forces.
The explanation of the true theory of the inclined plane was first made by Stevinus of Bruges. He supposed a loop of a string, loaded with 14 equal balls at equal distances, to hang over a double inclined plane whose sides were in the proportion of two to one, and which would therefore support four and two balls respectively. That the loop must remain at rest followed from the fact that after any motion it would still be in the same condition as before, so that if motion took place it would go on indefinitely and result in perpetual motion, which he regarded as an absurdity. He shows that the festoon of eight balls hanging below the planes may be removed without disturbing the equilibrium of those resting upon the planes; so that the four balls on the longer plane would balance the two on the shorter, which would make the weights supported by the planes proportional to their length. Stevinus also shows that when three forces act upon a point, they will be in equilibrium when they are in proportion to the sides of a triangle which are parallel to the direction of the forces. He however only gives a demonstration of the case in which two of the forces are at right angles to each other.
Leonardo da Vinci had before this obtained clear ideas regarding the equilibrium of oblique forces, as shown by extracts from his manuscripts published by Venturi in 1797. In 1499 Leonardo gave a correct statement of the forces exerted in an oblique direction on a lever, and made a distinction between the length of the arm of the lever and that of the perpendicular to the direction of the force. These views of Leonardo are believed to have been sufficiently known by Galileo to aid him in his speculations, and the modes of reasoning of the two are somewhat similar. Leonardo had also asserted that the time of descent of a body down an inclined plane is to the time of its vertical descent in the proportion of the length of the plane to its height. The most important discoveries of Galileo are in regard to the laws of falling bodies, as determined by his observations on the vibrations of a pendulum, which he found were proportional to the square roots of the lengths of the pendulum. He was also the first to enter into a mathematical investigation of the strength of materials in resisting strains.
The problems regarding the collision of bodies were attempted by Descartes, who made some important observations; but no clear ideas or theories were obtained till Iluygens in Holland and Wallis and Wren in England turned their attention to the subject, all these about the same time sending papers to the royal society of London. The first example of a correct solution of a problem of circular motion occurs in the theorems of Iluygens. The problem of the centre of oscillation was proposed by Mersenne in 1646, and had attracted the attention of Huygens when a youth, but he was then unable to find any principles sufficient for its solution. But when, in 1673, he published his Horologium Oscillatorinm, a fourth part of the work was on this subject, and the theories then advanced have been found strictly correct. In 1687 Newton's great work was published, when for the first time the science of mechanics was extended from a consideration of the action of forces upon bodies on the earth to the action of forces exerted between celestial bodies, and the adoption of the theory of universal gravitation.
It was enriched about the same time by the method of fluxions of Newton, and its improvement by Liebnitz, known as the differential calculus, an invention which greatly facilitated the investigations of mechanical problems. The illustrious family of Bernoullis of Basel, all of whom were natural philosophers, added much to the mathematical knowledge of mechanics. The transcendent mathematical powers of Euler gave analytical method to mechanical solutions. His memoirs occupy a large portion of the "Pe-tropolitan Transactions " from 1728 to 1783, and so many were left at his death that their publication was not completed in is 18. In 1747 D'Alembert and Clairaut sent on the same day to the French academy of sciences their solutions of the celebrated "problem of three bodies " (see Moon), which for a long time claimed the attention of mathematicians. The labors of Clairaut have been of great service to the science of mechanics, but his name, and those of D'Alembert, Lagrange, and Laplace, he-long more to the department of physical astronomy, and with others have received attention in the article Astronomy - The subjects of friction, strength of materials, theory 'of arches and domes,'perpetual motion, and hydromechanics, will be found under those heads.
Universal gravitation is treated in the articles Astronomy, Gravity, Moon, and under other astronomical titles, and the science of projectiles under Gunnery. This article will be occupied only with a consideration of the following subjects: 1, the laws of motion, including the laws of impact and uniformly accelerated rectilinear motion; 2, the composition and resolution of forces; 3, centrifugal force: 4, the pendulum; 5, the mechanical powers, or the theory of machines. Statical and dynamical principles will be treated in eon junction, as the subjects generally embrace both.
I. The Laws Of Motion
These laws were pretty well recognized if not established before the Principia of Newton was written. Galileo, Kepler, Descartes, Wren, Halley, Hooke, and Huygens had successively advanced toward a comprehension of them, the two works of the last named, on the impact of bodies and on centrifugal force, containing assumptions, if not direct statements, of what are known as the three laws of motion. The mission of Newton was more to generalize these laws and apply them to the solution of the motion of the heavenly bodies. His Principia commences with a statement of the laws of motion, and it is in the form there given that they are generally known. They are as follows: Law 1. Every body continues in a state of rest or of uniform motion in a straight line unless acted on by some external force. This law results from the property of inertia, by which matter cannot give itself or deprive itself of motion. Law 2. Change of motion is proportional to the force impressed, and is in the direction of the line in which that force acts. Law 8. To every action there is always opposed an equal reaction. Force may be defined as any cause by which a body is moved, or held in any position, or has its motion changed.
It may be the expansive force of steam and gases, animal power, the attraction of gravitation, or electricity. Inertia is that property of matter which offers resistance to any force tending to change its state of rest or of motion, and it is an element of the greatest importance in mechanics, requiring consideration in every calculation where change of motion takes place. A body occupying a fixed place in space would be in a state of absolute rest; but ordinarily a body is said to be at rest when it is stationary with regard to surrounding bodies. A body is in absolute motion when moving from one point to another in space, and in relative motion when it is regarded as moving with respect to some other body. The velocity of a moving body is the distance it travels in a given time, the units of space and time being the foot and the second. Velocity may be uniform or variable. It is uniform when the body moves through equal spaces in equal times. Variable motion may be regular or irregular, and it may be accelerated or retarded.
When it is accelerated in a constant ratio, it is said to he uniformly accelerated; and when in like manner retarded, it is said to be uniformly retarded. - Momentum and Impact. The f<»rce of matter in motion is called its momentum, and sometimes quantity of motion, and is equal to the mass or quantity of matter multiplied into its velocity; thus m=qxv the unit of mass being generally considered the pound avoirdupois. A cannon ball weighing 100 lbs. and moving with a velocity of 1,200 ft. per second would have a momentum of 120,000 lbs. or 60 tons. When two bodies have equal momenta, their velocities will be in the inverse ratio to their quantities of matter; that is, if qxv = q' xv', then v: v':: q': q. A force is impulsive when it acts for a moment only, like the stroke of a hammer. When such a force alone acts against a movable body, it necessarily causes uniform motion, a fact which may be shown experimentally by using At-wood's machine, as will be seen further on. When bodies meet by impact, the motion which results depends upon their degree of elasticity and upon their relative momenta. Bodies are elastic when they have the power of restoring their form after compression or expansion.
There are no solids which are perfectly elastic, although glass and steel are nearly so within certain limits. Permanent gases are perfectly elastic, having the property of expanding after compression to their original bulk, and of being unchanged in their power of resisting pressure. (See Elasticity.) Vapors are also perfectly elastic for all pressures at which the liquids from which they are derived are above their boiling points. (See Boiling Point.) Bodies are inelastic when they have no power of restitution after compression. Putty is almost perfectly inelastic. If an inelastic body, m, fig. 1, is moving in the direction m c, and it encounters another inelastic bodv, m' which is at rest, the two bodies will after impact move together with a common velocity equal to half that which the body m had before impact, this having imparted half its momentum to m!; therefore the momentum of the two bodies after impact must be equal to that of m before impact. If v represents the velocity of the body m before, and v' its velocity after impact, then mv=(m + m')v', >and v'=- - ,. When two inelastic bodies, moving in the same direction with unequal velocities, collide, they will move together with a common velocity, and with a momentum equal to the sum of their momenta previous to impact; or mv + m'v,=(m+m')v',or v" =(mv+m'v')/(m+m') It two bodies, m and m , fig. 2, moving toward each other, collide, they will come to rest if their momenta are equal; but if their momenta are unequal, they will after collision move together with a common velocity in the direction of the body having the lesser momentum, and with a momentum equal to the difference of momenta before impact; or mv - m'v'= (m + m')v", and v"(mv-m'v')/(m+m'). - The following are among the propositions of Huygens on elastic bodies.
If a body meets an equal body at rest, after impact the former will be at rest, but the latter will acquire the velocity of the impelling body. If two equal bodies moving with unequal velocities strike one another, they will after impact move with interchanged velocities. Any body, however large, is moved by any body, however small, and moving with any velocity whatsoever. If two bodies meet from opposite directions whose velocities are inversely in proportion to their quantity, each will rebound with the velocity with which it approached. These propositions may be experimentally verified by the apparatus shown in fig. 3. Let two elastic balls be suspended at equal heights by slender threads of a radius corresponding to the graduated arc a b. If one of the balls is raised and allowed to fall against the other, this will be impelled to a corresponding height; if both are raised to the same height and let fall, they will rebound to their original heights (theoretically); and if one is let fall from a greater height than the other, they will rebound with reciprocal velocities.
If several balls are hung between them so that they touch each other, and impact is made by a terminal ball, all the intermediate balls will remain at rest, the impulse being transmitted through them to the opposite ball. If a perfectly elastic ball is thrown obliquely against a smooth plane, it will be reflected so as to make the angle of reflection equal to the angle of incidence. If the ball is imperfectly elastic, the angle of reflection will be greater than the angle of incidence; and if the ball is perfectly inelastic, it will not be reflected, but will slide upon the plane. - Uniformly accelerated Rectilinear Motion; Laws of Falling Bodies. As a consequence of the property of inertia, when a body has been put in motion and all force is removed, it tends to continue in motion with uniform velocity and in a right line. But if the force which caused the motion is uniform and constant, the body will receive equal increments of force during equal spaces of time, and therefore its motion will become uniformly accelerated. The most uniform constant known force at the surface of the earth is gravitation, and it is by its means that the laws of uniformly accelerated motion are studied.
A body falling through the air does not in fact have its motion uniformly accelerated, because of the resistance of the air; but it can be proved by experiment as well as by a process of reasoning that such would be its motion in a vacuum. That all bodies near the surface of the earth tend to fall with equal velocities without regard to their density or bulk, is shown by the common guinea and feather ex-penment in a tube exhausted of air. The element of resistance of the air will not therefore, in considering the subject, be taken into account. The velocity of a falling body, in consequence of gravity being a uniform and constant force, will be in proportion to its time of fall, and its average velocity during any given space of time will be at the middle of that space; and therefore the velocity which a body in falling acquires at the end of any period of time will be double the average velocity from the commencement. Let the figures 1, 2, 3, 4, 5, 6 on the left of the column in the adjoining diagram represent the number of seconds during which a body falls from rest; they will also represent the velocities acquired at the ends of the seconds.
Now, as the average velocity during the first two seconds is acquired at the end of the first second, and as the average velocity of the next two seconds is acquired at the end of the third second, if we represent the space fallen through during the first two seconds by S, the space fallen through during the third and fourth seconds will he represented by 3 S, and for similar reasons the space fallen through during the fourth and fifth seconds will be represented by 5 S. Therefore, during equal successive portions of time a body falls from rest through successive spaces represented by the odd numbers 1, 3, 5, 7, &c; so that if the space through which it falls in one second be called a unit, that through which it falls during the first two seconds will be 1+3=4, and that through which it falls from rest in three seconds will be 1 + 3 + 5=9 spaces; or the spaces through which a body falls from rest during 1, 2, 3, 4, etc, seconds will be proportional to the squares of these numbers. We thus by a process of reasoning, and without the assistance of experimental demonstration, arrive at the following laws of falling bodies: 1. The velocity acquired by a body in falling is proportional to the time of fall. 2. The spaces through which a body falls in equal successive periods of time vary as the odd numbers 1, 3, 5, etc. 3. The whole space through which a body falls from rest is proportional to the square of the time. 4. The velocity acquired by a falling body during any period of time, if continued uniformly, will carry it through twice the space in the same time; a law which follows from the second law, by which the spaces fallen through during equal successive periods of time increase by a constant quantity, which is twice the space through which a body falls from rest during one second.
This constant quantity, which in this latitude is 32.16 ft., is usually expressed by the letter g. The following table embraces the facts contained in these laws:
Fig. 1.
Fig. 2.

Fig. 3.

Table Showing Laws Of Falling Bodies
TIME IN SECONDS. | Velocities acquired in values of g. | Spaces fallen through in values of 1/2 g. | Total height fallen through in values of 1/2 g. |
1... | g= 32.16 ft. | 1= 16.03 ft. | 1= 16.03 ft. |
2.. | 2g= 64.32 " | 3= 43.24 " | 4= 64.32 " |
3 ...... | 3g= 96.43 " | 5= 80.40 " | 9=144.72 " |
4............ | 4g=123.64 " | 7=112.56" | 16=257.28 " |
5............ | 50=160.80" | 9=144.72 " | 25=402 00 " |
6............ | 6g=192.96 " | 11=176.88 " | 36=578.88 " |
These laws may be experimentally verified with considerable accuracy, but in order to do so it is necessary to reduce the velocity of the fulling body, because a body dense enough not to be much affected by the resistance of the air soon acquires so great a velocity that it cannot be estimated with accuracy; and if the body is light, it soon meets with so much resistance that the motion becomes uniform. The most ancient method for diminishing the velocity was with the inclined plane, by Galileo. By referring to that part of this article which treats of the inclined plane, it will be seen that the force with which a body tends to move down such a plane is to the force with which it would fall freely as the height of the plane is to its length. If its height is 1 ft. and its length 16 ft., it will move down the plane 1 ft. during the first second, 3 ft. during the second second, and so on; and therefore through the 16 ft. during four seconds. But the results are not as accurate as with the employment of Atwood a machine, a simplified form of which, to facilitate explanation, is shown in fig. 4. Two equal weights, a and b, are suspended over a friction wheel placed at the top of a graduated post 9 or 10 ft. high.
A platform, p, having a joint by means of which it may be suddenly dropped at any desired moment by connection with clockwork, is placed just below the wheel. The weight a is placed upon this platform and loaded with a metallic bar, whose gravity is used as the accelerating force. At a chosen moment the platform falls and the weight begins to descend with accelerated velocity. A ring, c, placed at any desired distance below the platform, takes off the accelerating bar, after which the weight descends with uniform motion, only imperceptibly retarded by the air and an exceedingly small amount of friction. If the sum of the weights a and b is 99 ounces and the accelerating bar weighs one ounce, gravity acts practically on only one ounce, but it has to give motion to 100 ounces; therefore the velocity of descent will be 1/100 as great as that of a weight falling freely; so that during the first second it will fall only 1*93 in., during the fourth second only 13.51 in., and during four seconds only 61.75 in. It will be observed that the velocity may be varied by changing the weight of the accelerating bar.
By changing the position of the ring c from one point to another, the rate of acceleration may be determined, and the velocity of motion attained at any point of time or space fallen through may be ascertained by measuring the uniform motion of the weights after the removal of the accelerating bar. The principal advantage of this machine is the facility it affords for estimating the relations between the accelerating force and the space described in a given time. Atwood's machine has been modified by Bourbouze so as to act somewhat on the principle of Morin's apparatus next described. The weights are set in motion by means of temporary magnets, and upon a cylinder covered with smoked paper curves are traced by a vibrating style, which is also moved by a temporary magnet. Morin's apparatus is autographic, and in some respects, especially in its great accuracy and facility in verifying the law of acceleration, is preferable to Atwood's machine. Its essential parts are shown in fig. 5. A frame 8 or 10 ft. high holds the parts in position, which consist of a light wooden cylinder, M, about one third of the length of which is shown in the figure. It is turned by a weight, Q, suspended by a cord passing around a drum, G, which carries a cog wheel c that plays into the endless screw a.
At first the motion is accelerated, but after a short time, on account of the resistance of the air encountered by the revolving fan which is turned by the endless screw d, uniform motion is attained. Then, by pulling a cord, K, a lever, A, displaces a catch, C, which liberates a weight, P, which then begins to fall with accelerated velocity between two vertical guiding wires. The weight is provided with a pencil, I, which describes a line in descending upon the revolving cylinder, which, being marked with equidistant vertical and transverse lines, indicates at a glance the direction of the curve. When the paper is flattened out, this curve is found to be parabolic, thus showing that the spaces through which the weight falls are in proportion to the squares of the times. The other laws may also be verified by Morin's apparatus; but such verification is unnecessary, for the other laws are natural consequences of the law of squares. The following formulas are of frequent use in mechanical calculations.
If the number of seconds during which a body falls from rest is represented by t, and the space fallen through in one second by 1/2g, the entire space fallen through will be expressed by the following equation:s= 1/2gt2 (1). Now, as the velocity acquired in falling during one second is g, and as velocity is proportional to time of fall, we derive the following equation: v=gt, and v2=g2t2 (2). Dividing this by (1), we have - = 2g, whence v=√2gs (3). Example: "What velocity will a body acquire in falling 1,000 ft., and what time will it occupy in falling? Taking (3), v=√2gs = √64.320 = 253.6 ft. per second. Again, taking equation (1), s=1/2gt2 we derive t=√(2s/g)=√(2000/32.16)=7.88 seconds. A body does not fall in a perfectly vertical direction, because the point from which it falls, in consequence of its greater distance from the earth's centre, describes a greater circle than the point to which it falls. It will therefore strike a point somewhat to the east - about one fourth of an inch for a fall of 150 ft.
The motion of an ascending body is retarded by the same law as that by which a descending body is accelerated.

Fig. 4.
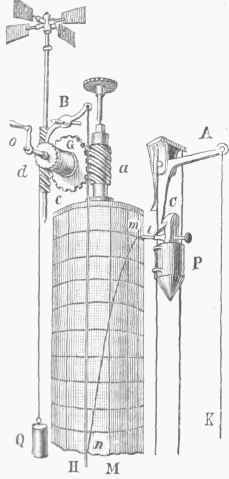
Fig. 5.
II. Composition And Resolution Of Forces
The union of two or more forces to produce a mechanical effect is called a composition of forces. Conversely, when a single force is replaced by two or more forces which produce the same effect, or when it is resolved into components for the purpose of mathematical analysis, such operation is called a resolution of forces. Analyses of cases must have regard to: 1, the quantity or intensity of the force or power; 2, the direction in which the force acts; and 3, the part of the body or load to which it is applied, and which is called the point of application. The quantity of force or power is usually expressed by assigning it a value in weight. It may also be represented by a straight line of proportionate length. Two or more forces acting in the same direction are equal to their sum; acting in opposite directions, they are equal to their difference. When two forces act together to produce a third, they may be represented by two sides of a triangle, while the resultant is represented by the third side. If a point is kept at rest by the action of three forces, these forces may be represented in quantity and direction by the sides of a triangle.
Thus, the point a, fig. 6, will be kept at rest when acted upon by three forces in the direction of the arrows b, c, and d, where the forces are represented respectively in quantity and direction by the sides h', c', and d'. If the adjacent sides of a parallelogram represent two forces in quantity and direction, the resultant forces will always be represented by the diagonal contained between them. Thus, if c a and c d, fig. 7, represent two forces equal in quantity, having the direction shown by the arrows, their resultant will be represented by the longer diagonal c b; but if a b and b d represent two forces acting in the direction of the arrows, the resultant will be represented by the shorter diagonal a d. These propositions may be experimentally verified by the method of Gravesande. Let two weights of 8 and 10 lbs. be suspended over two friction pulleys by a string, as shown in fig. 8, and let a third weight of say 14 lbs. be suspended from this string, between the pulleys. After a time the system will come to rest.
If now the string supporting the middle weight be extended upward vertically to some point as d, and da and de be drawn parallel to the strings a b and b c, a parallelogram will be formed whose adjacent sides ab and be, and whose diagonal bd will have the respective values 8, 10, and 14. The point b is acted upon by three forces represented by the respective sides of the triangle a d b in quantity and direction, the weight 8 acting in the direction b c, the weight 10 acting in the direction ba, and the weight 14 acting in the direction d b. The resultant of a number of forces acting upon the same point of a body may be determined by finding the resultant of the first two, and of this with the third, etc. This will be obvious by supposing four equal forces, ae, be, c e, and d e, fig. 9, acting at right angles to each other upon the point e. The resultant of ae and b e will be the diagonal fe of the parallelogram aebf; the resultant of feand ce will be be; and that of be and de will be zero; which will also appear by observing that the forces ae and ce balance each other, as also do the forces b e and d c.
The resultant of any number of forces may also be found by connecting the lines representing the forces, as shown in fig. 10. Suppose the forces to be represented in quantity and direction by the lines ab, be, cd, and d e. Connect the points a and e, and the line a e will represent the resultant of all the forces in quantity and direction; for ac is the resultant of a b and b c, a d that of a c and c d and a e that of a d and d e. The force which impels a sail vessel, moving with the wind off the quarter, is the resultant produced by the oblique action of the wind against the sails. Let ab, tig. 11, represent the position of the sail, and dc the direction and force of the wind. This force may be resolved into the components df and fc, the former parallel with and the latter perpendicular to the surface of the sail, and therefore the only force which is effective. But it is not acting in the direction of the keel, m k; therefore it must be resolved into the components fg and gc, the latter of which will represent in quantity and direction the effective propelling force given by the wind, whose force is measured by dc. - Centre of Gravity. The point through which the resultant of all the forces caused by attraction of gravitation of the molecules of a body passes is called the centre of gravity.
This point may be within the body, or, in consequence of its form, may be beyond it. The finding of the centre of gravity is a geometrical problem, hut with an irregular-shaped body it can most easily be determined experimentally by suspending it in two positions, and find-ing the point of intersection of the two vertical lines which pass through the two points of suspension. This point of intersection will necessarily be the centre of gravity, for it is evident that it must reside in each of the two verticals, as each vertical is the resultant of all the gravitating forces of the body while suspended in any one position. In the case of bodies of uniform density and of geometrical form, the centre of gravity is readily determined by geometrical principles. In a circle or sphere it coincides with the geometrical centre. In a plane triangle it is at the point of intersection of two lines joining the vertices of two angles with the middle of the opposite sides, as shown in fig. 12. In a cone or pyramid it is in the line joining the vertex with the centre of gravity of the base, and at one fourth the distance from the base. A body is said to be in equilibrium when the centre of gravity and the point of support are in the same vertical line.
When the point of support is above the centre of gravity, the equilibrium is said to be stable. Founded upon this is the sometimes so-called paradox of maintaining a beam in a horizontal position with only one end resting upon a support, as shown in fig. 13. The condition is easily understood if the beam b and the leaden ball a, with the attached bent rod, are considered as forming one body whose centre of gravity is at c. When this is vertically below the point of support the system will be in stable equilibrium. When a body has its centre of gravity above the point of support, but in the same vertical, it is said to be in unstable equilibrium. A distinction must be made between a state of stable equilibrium and a merely stable condition; for equilibrium implies a balance of force. A block, for example, may rest in a stable condition when lying upon the floor, although supported below its centre of gravity. But it cannot be said to be supported by a point; if it were, this point would need to be in a vertical with the centre of gravity. There are some cases of stable equilibrium when the centre of grav-itv is above the point of support.
Thus when the body is an oblate spheroid, stable equilibrium will exist when it rests upon one of its spoles a or b, fig. 14, because the centre of gravity occupies the lowest possible position. Disturbing the spheroid so as to bring the axis out of the perpendicular will raise the centre of gravity, and although it carries it to one side, as from c to c', the point of support is removed still further in the same direction, as from b to d; and therefore gravity will bring the body back till the axis is vertical. "When the point of support and the centre of gravity coincide, as in a wheel, the equilibrium is said to be indifferent, as is also the case when a sphere rests upon a horizontal plane, because the centre of gravity and point of support will always be in a vertical line. A prolate spheroid or an egg, lying on its side upon a plane, is in a state of stable equilibrium in one direction, and in that of indifferent equilibrium in another. Supported at the pole, the case becomes one of unstable equilibrium. The vertical line which passes through the centre of gravity is called the line of direction of the centre of gravity.
A body will rest upon a horizontal plane only when the line of direction falls within the base on which it rests; and its degree of stability or power to resist change of position depends upon the horizontal distance of the line of direction from the edge of the base as compared with the height of the centre of gravity above the base, or upon the length of the arc which the centre of gravity will describe when the body is raised from a horizontal position of the base to that in which the line of direction falls through the edge of the base. Thus, if a horizontal plane is rotated on one edge till its centre of gravity falls in the line of direction, it will describe the quadrant of a circle, as shown in fig. 15; while the centre of gravity of a cube requires to be moved only through an arc of 45° in order to bring it vertically over one edge, as shown in fig. 16.

Fig. 6.

Fig 7.

Fig. 6.

Fig. 9.

Fig. 10.

Fig. 11.

Fig. 12.
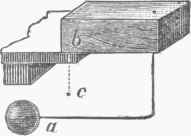
Fig. 13.
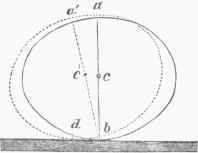
Fig. 14.
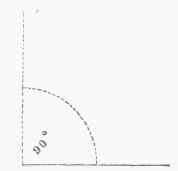
Fig. 15.
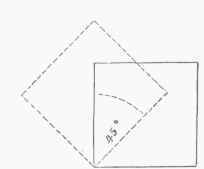
Fig. 16.
III. Centrifugal Force
We will consider only the case of a body revolving in a horizontal circle, and exerting force only in the plane of the circle. Such a force is exerted when a ball is placed upon a horizontal rod, as shown in fig. 18, and rotary motion is produced by turning a vertical axis. Let d m, fig. 17, represent the horizontal rod, and e the centre of motion, and suppose the body to be placed at m. The force exerted upon it by the revolution of the rod at each moment is perpendicular to the rod and in the direction of the tangent m e. To prevent its moving in that direction, therefore, some force must be exerted to restrain it. In this case the restraining force is the tension of the bar, the body being fastened to it. This force is called centripetal, and it is manifestly precisely equal to the force with which the body tends to fiy from the centre, or the centrifugal force. By its action the body is forced to move in the direction m a, and to arrive at a in the same time it would without restraint have arrived at e.
The two forces that have produced this deflection from me to m a are the force which is communicated by the rod, which may be represented by ab=m e, and the centripetal force, which may be represented by the line mb, and which is precisely equal to the force with which the body tends to fly from the centre, or the centrifugal force. It may be demonstrated that the centrifugal force of a body moving in a horizontal circle is equal to the product of its weight multiplied into the square of its velocity, divided by the product of the radius of the circle it describes, multiplied by g=32.16, or the constant accelerating increment of a falling body. This may be expressed by the equation c = w.x2/rg.Let n represent the number of revolutions or parts of a revolution per second, and 2?rr the circumference of the circle described by the body; then 2π.r.n will be its velocity. Hence c = (w(2πrn)2)/rg=(4π2/g).w.r.n2= 1.220x w.r.n2.

Fig. 17.
Therefore the centrifugal force of a body revolving in a horizontal circle is equal to its weight multiplied by the number of feet in the radius of the circle, and this product by the square of the number of revolutions or parts of a revolution per second, and this by 12275. Example: A ball weighing 10 lbs. is whirled in a horizontal circle on a radius of 5 ft., making 15 revolutions per second; what is its centrifugal force? 1.2275 x 10 x 5 x 152=13,873 lbs. (6.936 tons). In agreement with these principles are the first three of the celebrated propositions of Huygens appended to his Horolo-giwn Oscillatorium, which were then for the first time advanced: 1. If two equal bodies revolve in equal times in unequal circles, their centrifugal forces will be proportionate to the diameter of the circles. 2. If equal bodies revolve in equal circles with uniform but unequal velocities, their centrifugal forces will be proportional to their diameters. 3. If two equal bodies traverse with equal velocity unequal circles, their centrifugal forces will be in the inverse ratio of the diameters. It follows from the first proposition that the centrifugal forces of any two bodies revolving around their common centre of gravity are equal.
These propositions can be verified experimentally by employing the whirling table, fig. 18. A spiral spring which moves a registering index is fixed to one end of the horizontal rod. The adjustments may be so made as to cause a ball to revolve in any desired circle with any desired velocity. The applications of these principles are of daily occurrence. A horse or a carriage running in a circle exerts a centrifugal force requiring an inclination of the body toward the centre of the circle to counteract the tendency to be thrown over. The proper angle of inclination is found as follows: Suppose a horse to be running in a circle whose centre is c, fig. 19, and whose radius is a c. Draw the perpendicular a b to represent the weight of the horse, and let b d, parallel with a c, represent the centrifugal force; then a d will be the resultant, and the proper angle of inclination will be d a b, whose tangent = r2/rg. For tangent b ad =bd/ba=c/w= /v2/rg.An inclination is imparted to railway carriages when traversing curves, by giving such an elevation to the rail on the outer curve of the track that the cross section of the latter shall be perpendicular to the required inclination or line of direction.
Example: On a railway track 4 ft. 8 in. wide, how much elevation should be given to the outer rail on a curve of 600 ft. radius for a velocity of 30 ft. per second? Taking the equation c/w = v2/rg. the value becomes 900/19320 = 1/21.47. Therefore the outer rail must bo raised 1/21.47 of 56 in., or 2.6 in. When any body is rotated it has a tendency to revolve on its shortest axis, in consequence of the greater momentum in the par-tides furthest from the centre of motion. When a body having the form shown in fig. 20 is turned on its longer axis by means of a string suspended from c, if the body is perfectly regular and the geometrical axis perfectly coincides with the axis of motion, it will not change its posi-tion; but as such coincidence never exists, the body will on being rotated begin to change its axis of rotation, and when sufficient speed is attained, the increased momentum resulting from the change of position will cause the body to assume a position at right angles to its first position, and revolve about its shorter axis.
The oblate spheroidal figure of the earth and other heavenly bodies is due to the action of centrifugal force. (See Hydromechanics).
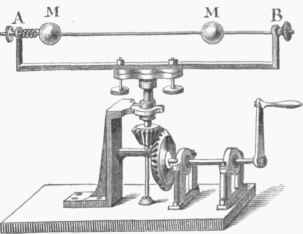
Fig. 18.
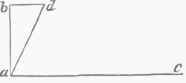
Fig. 19.

Fig. 20.
IV. The Pendulum
A simple pendulum may be defined as a body whose weight is confined to a point, and which, suspended from a fixed point, vibrates in an arc. A simple pendulum can only exist in theory. A single vibration of a pendulum is the distance through which it oscillates from the point at which it begins to descend on one side of the vertical, as at a, fig. 21, to the point on the opposite side of the vertical, as at b, where its motion is arrested by the action of gravity. Its passage from a to b and back to a is called a double vibration. All pendulums are compound because, having extension, their different particles are at different distances from the centre of motion, and therefore tend to vibrate in different times, because the time of vibration is increased by increasing the length of the pendulum. For small arcs the times of vibrations are the same; beyond certain limits increasing the arc increases the time. These facts were first ascertained by Galileo about 1585, when making use of the pendulum for counting time in astronomical observations.
It has been demonstrated by mathematicians that if a pendulum vibrates in a small circular arc, the ratio of the time of one vibration to the time in which a body would fall half the length of the pendulum is equal to the ratio of the circumference of a circle to its diameter. Therefore, according to equation (1), substituting I for s, and letting t denote the time of one vibration, we have t:√(t/g):: π: 1, or t = π√(l/g) - .
From this equation it will be observed that the time of vibration of a pendulum varies as the square root of its length. Squaring both members of the equation, t2=π2l/g,or l=t2g/π2 = A half-seconds pendulum is therefore found as follows: l =((1/2)2x32.16ft)/3.1415922= 96.48/9.87in=9.77in..
A seconds pendulum is 39.1 in., and a two-seconds pendulum 156.4 in. When the arc of vibration is 1° on each side of the vertical, the daily retardation compared to the vibration in an arc which causes no retardation is 1 2/3 second. When the arc is 2°, the loss is 6 2/3 seconds; when 3°, it is 15 seconds; the formula for estimating the retardation being 5/3D2, where D represents the number of degrees the pendulum describes on each side of the vertical. The inequalities in the times of vibration were obviated by Huygens by causing the pendulum to vibrate in a cycloidal arc, which he was the first to demonstrate is the curve of quickest descent from one point to another. To produce this cycloidal vibration, it is only necessary to cause the string by which the pendulum is suspended to wind around a semi-cycloid placed at each side, and to unwind from it when it falls from rest, as shown in fig. 22. The practical difficulties in the use of cycloidal arcs for pendulums are however greater than the advantage gained; therefore the pendulums of astronomical clocks are made to vibrate in small circular arcs.
It has been said that in a compound pendulum there is a tendency in the different parts which are at different distances from the point of suspension to vibrate in different times. This will appear from a consideration of fig. 23. Suppose several balls, A, B, C, D, E, suspended by separate strings of unequal lengths from a horizontal bar at M. If they are all let fall at the same time from the line M E, the ball A on the shortest string will descend more rapidly than B, B more rapidly than C, etc, so that after a time they will have the positions A', B', etc. If they are all attached to the same wire and kept in the same line while vibrating, the balls moving in the smaller arcs will tend to accelerate the motion of those further from the centre of motion, and those vibrating in the larger arcs will tend to retard the motion of those nearer the centre of motion. Therefore there is a certain point where there is neither a tendency to retard nor to accelerate; this point is called the centre of oscillation of the system. The distance between this point and the point of suspension measures the length of a compound pendulum. If a homogeneous cylindrical bar is suspended at one end and made to vibrate, the centre of oscillation is two thirds the distance from the point of suspension.
The discovery of the centre of oscillation, as we have seen, also marked an era m the science of mechanics, being one of its most important principles, and having a wide application. The centre of oscillation and the point of suspension of a pendulum are convertible points; that is, if the centre of oscillation is made the point of suspension, the time of vibration will not be changed; a principle which allows of the experimental determination of the centre of oscillation, and therefore of the length of the pendulum. The centre of oscillation may be entirely beyond the pendulum, as in the metronome, an instrument used to measure time in music. (See Metronome.) Its principle is shown in fig. 24, where a horizontal axis supports a rod, upon which there are two balls whose distance from the centre of motion may be varied at pleasure. If the balls are of equal weight and at equal distances from the centre of motion, they will not oscillate; but at unequal distances they will, and slowly in proportion as the difference of distance is small. The pendulum affords a correct means of finding the value of g, and therefore the height through which a body will fall from rest in one second of time.
Taking the equation l = t2g/π2 and transposing, we have g = π2l/t2. Therefore, if the length of the seconds pendulum is 39.1 in., the equation becomes in numbers g = 3.141592 x 39.1 = 32.16 ft., which is twice the space through which a body will fall in one second of time. - The principal use of the pendulum is to measure time. To do this accurately, it is necessary to keep the point of suspension and the centre of oscillation at the same distance from each other, or in other words, to preserve a constant length. Increase of temperature causes a pendulum made of one piece to lengthen by expansion. If, however, two materials are so combined that while the expansion of one tends to lengthen the system, that of the other tends to raise the centre of oscillation, and the combination is such that the expansion of one shall exactly counteract that of the other, the desired end is attained. Such pendulums are called compensation pendulums. Two forms are shown in figs. 25 and 26. The bob of fig. 25 consists of a steel frame holding a hollow glass cylinder containing mercury. It is evident that if this mercury by its expansion causes the centre of oscillation to rise just as much as the expan- sion of the rod causes it to descend, the length of the pendulum will remain unchanged.
Now, mercury expands about 14 times as much as steel, if the rod and frame are of steel, the column of mercury should be a little less than 6 in. for a seconds pendulum. Fig. 26 is the gridiron pendulum. It is made of brass and steel, whose rates of expansion are about in to 6. The bars are so arranged that the expansion of the brass shall exactly compensate that of the steel both in the gridiron and in the rod above it. The pendulum is used as a standard of measures of length. The length of a seconds pendulum at London was in 1824 declared by parliament to be 39.1393 in., and our government has adopted that standard. The French government in 1790 adopted as its standard the 1/10,000,000 part of quadrant of a great circle of the earth, which they called a metre, equal to 39.37079 English inches.

Fig. 21.
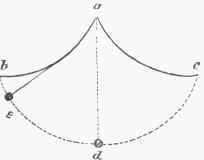
Fig. 22.

Fig. 23.

Fig. 24.

Fig. 25.

Fig. 26.
V. Mechanical Powers. Theory Of Machines
A machine is an instrument or contrivance by which force may be transmitted from one point to another. The force employed in working a machine is called the power; the resistance which the body acted on offers to the force is called resistance, weight, or load, and is expressed in terms of weight whose unit is usually the pound avoirdupois; the point at which the power is applied is called the point of application; the line of direction of the force is the line in which the force is applied, and in which it tends to make the body move, although it usually moves in the direction of a resultant. That part of a machine which is immediately applied to the resistance is called its working point. The power, like the resistance, is expressed in units of pounds avoirdupois. It is usual, in explaining the theory of machines, to neglect many conditions for the purpose of perspicuity and convenience, which are afterward taken into account. Thus the parts of a machine are primarily supposed to have no weight, to move without friction, and to encounter no resistance from the air. After the theoretical effects have been calculated, these accidental effects receive attention. Machines are divided into simple ami compound. The definition of a simple machine is not so obvious as is often thought.
It is sometimes defined as consisting of one part; but as the pulley and wheel and axle are called simple machines, this definition is not exact, because each of these consists of several parts. If we conclude, however, that the only simple machines are the lever, the inclined plane, and the cord, this definition may be accepted; but simple machines, or, as they are often called, the simple mechanical powers, have generally been divided into six classes, viz.: 1, the lever; 2, the wheel and axle; 3 the pulley; 4, the inclined plane; 5, the wedge; 6, the screw.
1. The Lever
This power may be defined as an inflexible bar resting on a fixed point or edge, called the fulcrum or prop. Levers are of three kinds, called the first, second, and third. The first kind is shown in fig. 27, where the fulcrum is between the power and the weight, and separates the two arms of the lever. These two arms are usually of unequal length, the weight having the same ratio to the long arm as the power has to the short arm. The second kind of lever, fig. 28, has the weight between the fulcrum and the power. The third kind, fig. 29, has the power between the weight and the fulcrum. In the first kind of lever it is evident that to produce equilibrium the power may be either less or greater than the weight, according as it is placed further from or nearer to the fulcrum. The proportion of power to resistance, in any kind of lever, to produce equilibrium is reckoned in the inverse proportion of the distance of these forces from the fulcrum; the weight multiplied into the distance from the fulcrum being equal to the power multiplied into its distance from the same point. It cannot therefore be said that the second and third kinds of lever have two distinct arms.
In the second kind, the weight, being always near the fulcrum, must always be greater than the power; in the third, the power, being always between the weight and the fulcrum, must always be greater than the weight. As the distances through which the power and weight move are in proportion to their respective distances from the fulcrum, it follows also that equilibrium is maintained when the product of their weights into the distances they respectively travel, or in other words, into their velocities, are equal, and furthermore that when a weight is moved by means of a lever, what is gained in power is lost in velocity. The common steelyard is an example of a lever of the first kind, nut crackers of the second, and fire tongs of the third. All these three kinds of lever are found in various parts of the mechanism of the human body and in that of many of the lower animals. An example of the first kind is seen in the movement of the occipital bone upon the atlas or upper bone of the spinal column. The raising of the body upon the toes by the action of the muscles of the calf of the leg, if the ankle joint is considered as a fulcrum, is an example of a lever of the second kind.
The action of the biceps muscle upon the forearm, where the elbow joint is a fulcrum and the weight is held in the hand, is an example of a lever of the third kind. The power or the weight may act npon the lever in an oblique direction; but in making calculations the perpendicular distance of the lines of direction from the fulcrum must be regarded instead of the actual distances on the lever, as will be readily understood by observing fig. 30, where the power is applied in the direction dp, the long arm of the lever, ca, being practically reduced to the side c d of the right-angled triangle c d a. When two or more levers, of one or more kinds, are combined, the system is called a compound lever. Platform weighing scales, such as are shown in fig. 31, are combinations of this kind, where the beam is a lever of the first kind, and e b, a b, and gf levers of the second kind, if we consider the weights on the beam km the power; but if we consider the load as a force acting on the platform and raising the weights at p, then a b, c b, and fg become levers of the third kind.
2. The Wheel And Axle
This power is a modification of the lever, and consists of a wheel and cylinder, or of two cylinders of unequal radii, revolving about a common axis, the larger cylinder being called the wheel and the smaller the axle. The wheel and axle may have the action of either kind of lever, but usually has that of the first, as shown in fig. 32, where the power is applied at «, the fulcrum is the axis c, while the weight is suspended from the short end of the lever, which is equal to the radius of the axle, the long end being equal to the radius of the wheel. If, however, the weight is suspended upon the same side with the power, and the latter is applied in an upward direction, as is often the case, the machine acts upon the principle of a lever of the second kind; and by applying the power to the axle the machine may be made to act as a lever of the third kind. Indeed, practically, levers are constantly changing in their action from one kind into another; thus a shovel or hay fork held in the two hands may at one moment be a lever of the first kind and at the next one of the third kind, as the one or the other hand becomes fixed or movable.
In the simple wheel and axle the mechanical advantage is in proportion to the ratio of the radius of the wheel to that of the axle; if the former is 5 ft. while the latter is 5 in., the ratio of power to weight is as 1 to 12. This mode of increasing the efficiency of the machine is often inconvenient, and may be obviated by employing a differential axle, consisting of two parts of different diameters, as represented in fig. 33, the cord winding upon one part and off the other, and the weight being supported by a pulley. The most common plan in machinery is to employ a system of cog wheels, as shown in fig. 34. An equilibrium of forces will obtain where the product of the power multiplied into the radii of all the wheels is equal to that of the weight multiplied into the radii of all the pinions. Cog wheels are of three kinds, spur, crown, and bevelled. A spur wheel is shown at a, fig. 35, a crown wheel at b, and bevelled wheels at c. They are used to change the direction of force or axis of motion. The wheel and axle when applied to carriages serves a different purpose from that in ordinary ma-chinery, and acts in a different way.
The action of the carriage wheel when ascending an inclination is like that modification of the inclined plane called the toggle joint (fig. 44). When the road is a rigid and level plane, the wheel merely serves to afford successive supporting points to the load, the only resistance to be overcome being the sliding friction of the axle and the rolling friction between the wheel and the road. (See Friction).
3. The Pulley
The pulley is commonly said to act upon the principle of a lever of the first kind with equal arms, but this dors not explain its principle. In fig. 30 we have indeed a lever of the first kind, with equal arms a c and c b; and fig. 37 shows another such lever in the stationary pulley, and also a lever of the second kind in the movable pulley, where the power is applied at f, the weight suspended at b, while the fulcrum, which is changeable as the pulley ascends, is at a. This would seem to account for the mechanical advantage, which is in the ratio of 2 to 1; but in place of the pulleys there may be substituted smooth cylinders which shall not revolve, and if they are well lubricated a similar mechanical advantage is obtained as when revolving pulleys are used. In this case there is evidently no use of a lever, so that it must be concluded that the mechanical advantage which is obtained is derived from the use of the cord. The system of pulleys shown in fig. 38 may include any number, the mechanical advantage being doubled with every additional movable pulley; for it is evident that the cord a sustains half of the weight W, and the cord c half of this, or one fourth of the whole; and further, that the cord e or f sustains one eighth of the whole.
Several pulleys may be placed in one block. Instead of having one fixed pulley and the others movable, they may be placed in two frames or blocks, as shown in fig. 39, one block being fixed and the other movable. In this case one cord goes round all the pulleys, and therefore the weight is divided equally between the parts of the cord in the lower block, which parts are equal to twice the number of pulleys in the block. In this arrangement, where there are three pulleys in each block, the power will therefore be to the weight in the ratio of 1 to 6. 1 he pulley is a very portable and efficient power, the cord allowing great freedom in changing the direction in which the power is applied, by the employment of fixed single pulleys, which may be fastened to the ground, allowing of the application of horse or steam power, or of any desired number of men. The rigging of ships is almost entirely managed by means of the pulley, and the hoisting of building material is to a great extent effected by the same machine.
4. The Inclined Plane
This power depends for its efficiency in the elevation of great weights upon the nearness with which the plane approaches to a horizontal surface. The power required to produce the equilibrium of forces on an inclined plane may be determined in the following manner: We will suppose two cases, the first in which the power is applied in a direction parallel to the plane, and the second in which it is applied in a horizontal direction, or parallel to the base. Let m, fig. 40, be the centre of gravity of a freely moving body resting on a plane whose length is a b, and whose height is b c. Let the perpendicular m e fall from the centre of gravity upon the plane; also draw m d perpendicular to the plane. Let m e represent the force of gravity, then will m d represent the pressure perpendicular to the plane, and d e or m I will represent the force in quantity and direction with which the body tends to move downward along the plane. An equal force acting in the opposite direction will therefore produce equilibrium. Since the triangle me d is similar to abc, ed: em:: bc: ah. Consequently, when the power is applied in a direction parallel to the plane, equilibrium will exist where p: w:: height of plane: length of plane, or p: w:: sin a: rad.
In the second case, where the power is applied in a direction parallel with the base, produce m d to h, and draw e h parallel to the base; then will eh or mh of the parallelogram m chh represent the force necessary to produce equilibrium, and m h will represent the pressure perpendicular to the plane. But in this case e h: e m:: b c: a c. Therefore, power: weight:: height of plane: length of base of plane, or p: w:: sin a: cos a.
5. The Wedge
Fig. 41, is a double inclined plane. It is used for forcing asunder bodies which offer great resistance, such as fibres of wood and the seams of rocks. It is usually propelled by percussion, which is applied to the head in the direction of its length, from a to h. The forces will be in equilibrium where the proportion of powder to resistance is the same as that of thickness of head to length of wedge. It is, however, difficult to estimate the power of percussion. To make the instrument effectual, considerable friction is required to prevent the resistance from forcing the wedge out of the crevice into which it has been driven.
6. The Screw
This machine is another form of the inclined plane. If a triangular piece of paper is wound around a cylinder, as shown in tig. 42, it will illustrate the formation and principle of action of the screw. In passing once around the cylinder, the height between two adjacent layers of the edge which forms the hypothenuse will represent the height of a plane which has the circumference of the cylinder for its base. The power is applied by means of a lever, and in a direction at right angles to the axis of the screw, or in a direction parallel with the base of the plane. Therefore the forces are in equilibrium where the proportion of power to resistance equals that of the distance between the threads to the circumference of a circle described by the revolution of that point in the lever to which the power is applied. The distance between the threads is measured in the direction of the axis of the cylinder. The power of the screw is increased by increasing the length of the lever by which it is turned, or by diminishing the distance between the threads. It may also be increased by letting a screw with comparatively fine threads pass within another having coarser threads, thus causing the height of the plane to be practically diminished to the difference in distance between the threads.
This form is called Hunter's differential screw. An endless screw is often combined with spur or crown wheels in the manner shown in tig. 43. It is often employed to measure minute spaces, as in the dividing engine for graduating mathematical instruments. (See Graduation).
Toggle Joint
The toggle joint, or elbow joint, which is used in various kinds of presses, consists of two radii or arms joined together by a hinge, as shown in fig. 44. The power may be applied at the hinge or joint a, usually in the direction a m, forcing the ends b and c further apart, and with great power as the arms approach a right line. It may also be applied at b and c, drawing the ends together, and forcing the point a outward in a transverse direction; a form used in hay and cotton presses. That this machine acts upon the principle of the inclined plane may be demonstrated as follows: Consider the end b of the radius a b to be stationary. The power being applied in the direction a m, the point a will describe the arc of a circle ad. A tangent to this arc, at any point in which the joint a may be moving, will represent the inclination, and m n the height of the plane by which the equilibrium of forces is determined. .If the radius a b is inclined at an angle of 45°, then the inclination of the plane will be 45°; so that if we consider it to have extension, its base will be equal to its height, and the power being applied in a horizontal direction it will produce equilibrium when it is opposed to a force having the effect of an equivalent weight suspended vertically from a.
As the point a approaches d the tangent will approach a horizontal direction, and at last become perpendicular to the radii a b. a c. which will then be brought to form one and the same straight line, the theoretical force at this instant becoming infinite. The ratio of power to resistance in the case represented in the figure is as mn: am, or as the height of the plane is to its base; or p: w:: sec b - cos b: sin b. - A carriage wheel in overcoming an obstacle acts upon the same principle. Let c, fig. 45, be an obstacle, and a g the line of draught. The weight, sustained by the axle at a, acts perpendicularly, and to overcome the obstacle this point must be raised to the position of b, vertically above it. At first the motion of the axle will tend in the direction of the tangent a d and there will be equilibrium when p: w:: dg: ag. It will successively move in the direction of tangents at every point in the arc a b. until it will finally take the direction of the horizontal tangent/6, when the obstacle will be overcome. This action has also been explained upon the principle of the lever of the first kind.
The obstacle is considered as a fulcrum supporting the bent lever a c n, the arm to which the power is applied at the axle being the radius of the wheel, a c, and the other arm, c n, the horizontal distance from the obstacle to a vertical let fall from a. The point n in this vertical is supposed to support the load. The practical length of the arm a c is the perpendicular drawn from c to the line of draught; thus, if the line of draught is in the direction dg, p: w:: nc: gc. The load, however, is actually supported by the axle at a, and the power is also applied at the same point, so that the analogy of the action to that of the lever is not as close as to that of the inclined plane. - For a further consideration of the science of mechanics, besides the works of Huygens, Newton, and others already mentioned,'see L. N. M. Carnot, Principes fonda-mentaux de Vequilibre etdu mouvement (Paris, James Renwick, "Elements of Mechanics" (Philadelphia, 1832); Poisson, Traite de mfoanique (Paris, 1833); the Rev. II. Mose-Ley , "A Treatise on Mechanics" (London, 1834); Christopher Bernoulli, Elementarisches Handbuch der industriellen Physik, Mechanic und Hydraulik (Stuttgart and Tubingen, 1834-'5); W. B. Carpenter, "Elements of Mechanical Philosophy" (London, 1844); Arthur Morin, Legons de mecanique pratique (Paris, 18.53); " Appleton's Dictionary of Mechanics" (New York, 1868); W. H. C. Bartlett, "Elements of Svnthetic Mechanics" (New York, 1871); W. G. Peck, "Elements of Mechanics" (New York, 1873); and Thomson and Tait's "Natural Philosophy" (London, 1874). The reader may also consult Bibliotheca Mechanico-Technologica, by Engelmann (Leipsic, 1844).

Fig. 27.

Fig. 23.
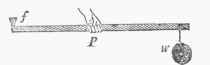
Fig. 29.
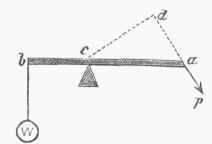
Fig. 30.
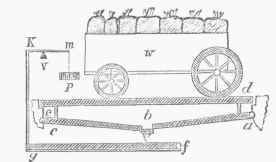
Fig. 31.
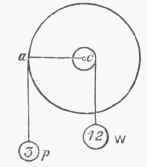
Fig. 32.
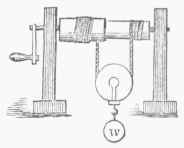
Fig. 83.

Fig. 34.

Fig. 85.
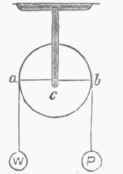
Fig. 36.

IV,. 37.

Fig. 33.

Fig. 39.
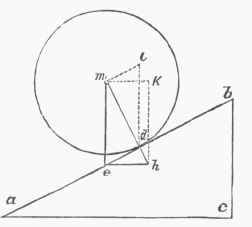
Fig. 40.

Fig. 41.
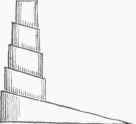
Fig. 42.
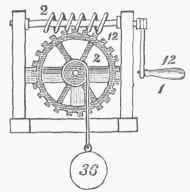
Fig. 43.

Fig. 44.

Fig. 45.
Continue to:
My Books

