Design Of Complicated Cams
Description
This section is from the book "Modern Shop Practice", by Howard Monroe Raymond. Also available from Amazon: Modern Shop Practice.
Design Of Complicated Cams
It should be especially noted, that in all the cases of cams thus far studied, the methods of procedure are absolutely identical. In the more complicated cases of cams which follow, and others which may arise in the designing of special machines, the same principles apply, however much they may apparently be disguised by the conditions of the problem. A good method to follow in designing a complicated cam is first to study the cam by the tracing-cloth method, as described on page 84. After an approximate outline of the cam has been determined as being possible, and giving about the motion of the follower desired, then the more formal method of rotating the follower about the cam can be applied, to give the exact outline. It should be remembered that it is not possible to reproduce by cam movements all combinations of length of travel, angle of rest, rise, and fall, as fixed by the conditions of the problem. In such cases the cam is designed to give the nearest possible approach to the motion desired, or some of the working conditions are changed.
In each of the cases considered, it has been assumed that the follower is always held against the surface of the cam, either by its own weight or by a spring. Another method of accomplishing this is to make a cam with two surfaces, the follower running between them in the groove thus formed.
Plate Cams With Complex Motions Uniform Motion
All cams thus far considered are of the uniform-motion variety, that is, having equal rise in equal time. This means that each fraction of the travel of the follower is made in the same time as each other similar fraction; and likewise, that each fraction of the rotation of the cam is made in the same time as that of any other fraction of its movement. In further explanation of the term "uniform motion", suppose a railway train to travel ten miles in twenty minutes, the speed of the train being the same during each minute; it would travel ½ mile in each minute, and would have a uniform' speed or velocity of ½ mile per minute. Under such conditions the train would be moving at the full speed of ½ mile per minute, both at the beginning and at the end of the ten miles. If, however, it had exactly ten miles to travel and exactly twenty minutes to do it in, and must be at rest at the beginning and at the end of the given time, it could not gain its full speed in an instant or lose it in an instant, but must start and stop gradually. Therefore, during the first part and the last part of the time, it would be moving at a speed slower than ½ mile per minute, and must go faster than ½ mile per minute during the middle part of the run, to make up for the time lost in starting and stopping. Such motion would not be uniform. The more suddenly the train starts and stops, the more nearly uniform the main part of the travel may be, but the greater the shock when starting and stopping.
Suppose we have a piece to be moved one foot in ten seconds; if the motion is to be uniform, the piece would have a velocity of 1/10 foot per second. If the piece is light and the mechanism which does the moving is sufficiently powerful, the piece may be made to start and stop almost instantly without serious shock, and consequently may have practically uniform motion.
Variable Motion
If the mechanism which moves the piece be so designed as to start and stop it gradually, the shock will be avoided. We may have a gradual increase of speed at the start, until full speed is attained; then a uniform full speed during the main part of the stroke; and finally a gradual decrease of speed to a full stop at the end of the stroke; or the speed may increase during the entire first half of the stroke, and decrease during the entire last half, the motion at no time being uniform. The first condition is used where the piece is doing work during the stroke, as, for instance, the cutting stroke of a tool; and the second condition, wherever quick motion is desired without regard to its character, so long as it is without shock.
Harmonic Motion
In Fig. 87, let the semicircle ABD represent the path along which a piece moves with a uniform velocity. Now, if we have another piece moving along the diameter AD, starting from A at the same time as the first piece, and moving at such speed that a perpendicular let fall from any position of the first piece to the line AD will locate the second piece - that is, when the first piece is at C, the second piece is at E; when the first piece is at B, the second is at 0; and so on - then the piece which travels along the line A D has harmonic motion. It moves slowly at first, increases to a maximum speed at the center, and decreases to rest at the end. This motion is quite common for shaper rams, slotters, and feed-mechanisms. Cams can readily be designed to give such a motion.
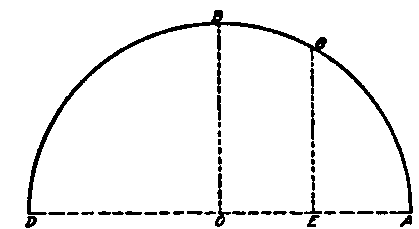
Fig. 87. Harmonic Motion Diagram.
Uniformly Accelerated And Retarded Motion
A piece which has uniformly accelerated and uniformly retarded motion (see article on Mechanism) moves through one unit of space in the first unit of time, three the second, five the third, seven the fourth, nine the fifth, etc., to the middle of its stroke, then decreases at the same rate to the end of the stroke. For example, if a piece is to move with uniformly accelerated and retarded motion one foot in ten seconds, it will move 1/60 foot the first second, 3/60 the second, 6/60 the third, 7/60 the fourth, 9/60 the fifth, when it will have traveled 1/60+3/60 +6/60+7/60+9/60 ( = 2/5 5/0), or ½ the whole foot in one-half the whole time, the speed increasing all the time; at the end of the fifth second, when half the distance has been traveled, it begins to slow down, and travels 9/60 the sixth second, 7/50 the seventh, 5/60 the eighth, 3/60 the ninth, and 1/60 the tenth. The rate at which the velocity increases during the first half of the time is often made the same as that at which the velocity of a weight increases when dropped from a height; and the rate at which the velocity decreases during the last half of the time, the same as that at which the velocitv of a weight decreases if thrown straight up into the air. This particular form of uniformly accelerated and uniformly retarded motion is, therefore, known as gravity motion. It is commonly produced by cams, although not often used for motions greater than a few inches.
If in Fig. 79 it had been required to raise and lower the follower with harmonic instead of uniform motion, the only difference in procedure would have been in dividing up the path 06. The divisions of 06, instead of being equal, would be found as shown in Fig. 88. Suppose the line Ae to be the same length as 06; on this line as a diameter, draw a semicircle, and divide this semicircle into as many equal parts as the arc of rise is divided. In this case, suppose the arc of rise to be divided into 8 equal parts; then the semicircle is likewise divided as shown in the figure. From the points B, C, D, etc., drop perpendiculars to the line Ae, cutting it at points 1, 2, 8, etc. For the first eighth of the arc of rise of the cam, let the follower rise the distance A-1, for the second eighth the distance 1-2, for the third eighth the distance 2-8, and so on. Such motion of the follower is harmonic motion.
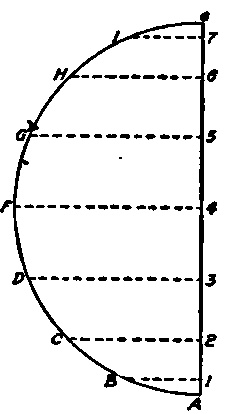
Fig. 88. Semicircle Showing Harmonic Steps.
If it is required that the follower shall rise and fall with uniformly accelerated and retarded motion, the method of dividing the line of travel Ae is shown in Fig. 89. As in the case of harmonic motion, suppose the arcs of rise and fall each to be divided into 8 equal parts. Now, the line Ae must be divided into 8 parts, but these parts must be such that, beginning with the point A, the distances A-1,1-2,2-3, and 8-4 shall be in the ratio of 1, 3, 5, and 7; and the distances 4-5, 5-6, 6-7, and 7-e shall be in the ratio of 7,5, 3, and 1; in other words A-1 is 1/32 of the whole line Ae; 1-2 is 3/32 of Ae, 2-3 is 5/32 of Ae, and so on. To divide up the given length Ae so that the divisions may bear the above relation to one another, draw the line At at any convenient angle, and, choosing any convenient distance as a unit, mark it off on this line 32 times, beginning at A. From I, the last of these dividing points, draw a line to e; next find the point B, the first division from A; C the third from B, D the fifth from C, E the seventh from D, F the seventh from E, G the fifth from F, H the third from G; and through the points H, G, F, E, etc., draw lines parallel to Ie, cutting the line Ae at 7,6,5,4, etc. It is obvious that Ae is then divided in the same proportion as A I, and if the follower were made to travel along the line Ae according to these divisions, it would have uniformly accelerated and retarded motion.
Continue to:
My Books

